
Как проводится измерение с помощью лазерного дифракционного анализатора размера частиц?
2023-07-14WIKI
При лазерном дифракционном анализе размеров частиц измерения проводятся в следующей последовательности:
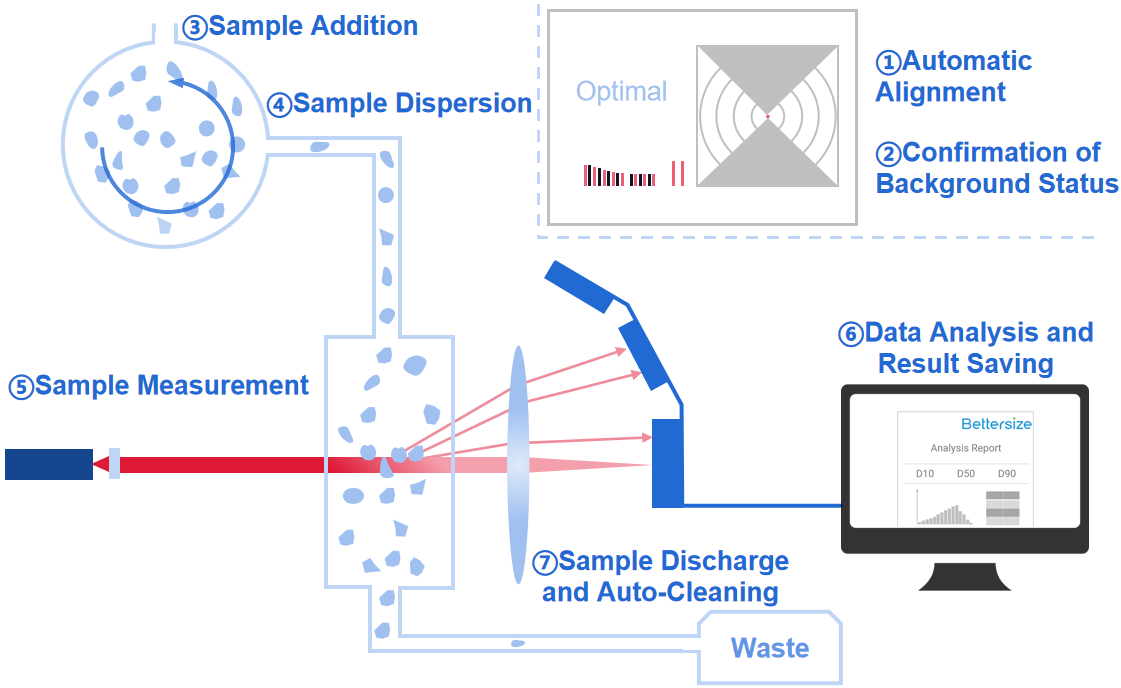
Автоматическое выравнивание
Это функция настройки, которая позволяет сфокусированному лазеру пройти через линзу Фурье и совпасть с центром переднего детектора. Выравнивание будет выполняться автоматически до тех пор, пока лазерный свет не попадет точно в центр переднего детектора. После выравнивания детекторы получат правильный сигнал рассеянного света для измерения базовой линии. Перед выравниванием ячейка для образца должна быть полностью заполнена измерительной средой, а при использовании мокрого метода необходимо удалить пузырьки и грязь. При использовании сухого метода в зону измерения необходимо ввести газ.
Подтверждение состояния фона
Высокий фоновый сигнал может быть вызван оптическими или электрическими шумами, например, оптическими шумами, вызванными загрязненной ячейкой для образца или даже чистой средой. Чтобы свести к нулю влияние этих шумов, фоновый сигнал должен быть измерен до измерения, чтобы его можно было вычесть из общего сигнала светорассеяния по завершении измерения.
Введение образца
После подтверждения хорошего фона образец может быть введен (или предварительно диспергирован) в дисперсионный модуль.
Диспергирование образца
Попав в модуль диспергирования, образец будет диспергирован с помощью перемешивания и ультразвука в мокром методе. При сухом методе регулируется давление, обеспечивается столкновение и сдвиг.
Измерение образца
Полностью диспергированный образец переносится в ячейку для образцов, где происходит лазерное облучение. Лазерный источник испускает пучок монохроматического и когерентного лазерного излучения. Этот лазерный луч затем фильтруется, расширяется и коллимируется, чтобы обеспечить параллельность лучей. Если на оптическом пути пучка находятся частицы, они взаимодействуют со светом в виде рассеяния. Часть световых лучей рассеивается наружу под определенными углами по отношению к главной оси. Крупные частицы рассеивают большее количество света при меньших углах рассеяния, а мелкие частицы рассеивают большее количество света при больших углах рассеяния.
Анализ данных и сохранение результатов
Сигналы, вызванные рассеянным светом, принимаются детекторами и передаются в компьютер для анализа, чтобы система могла составить распределение частиц по размерам.
Слив образца и автоматическая очистка
После измерения образец сливается, и включается автоматическая очистка.
 | Затрудняетесь понять концепции анализа частиц? Наше новое ' Руководство для начинающих по анализу частиц ' поможет вам разобраться в этих понятиях самым доступным образом. Скачайте его в формате PDF , чтобы читать в поезде, самолете или в любом другом месте, где нет интернета.. |
Rate this article
Share On


